 资源下载
资源下载

Catia v5 DMU Kinametics的四杆机制
文件列表(压缩包大小 1.96M)
免费
概述
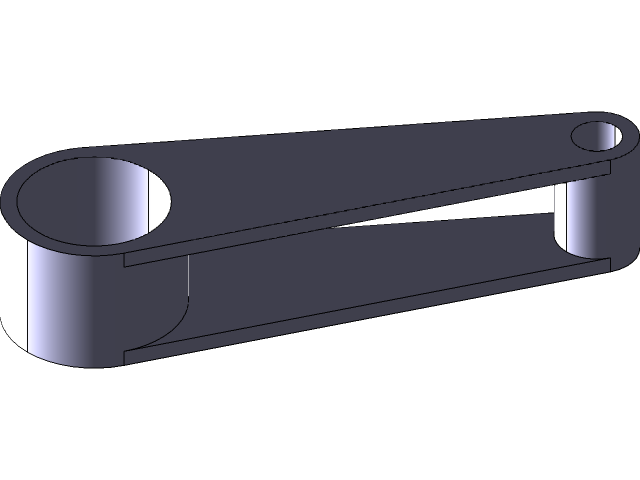
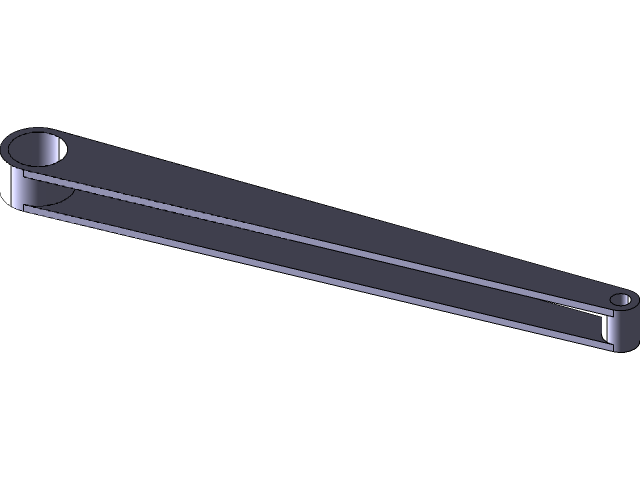
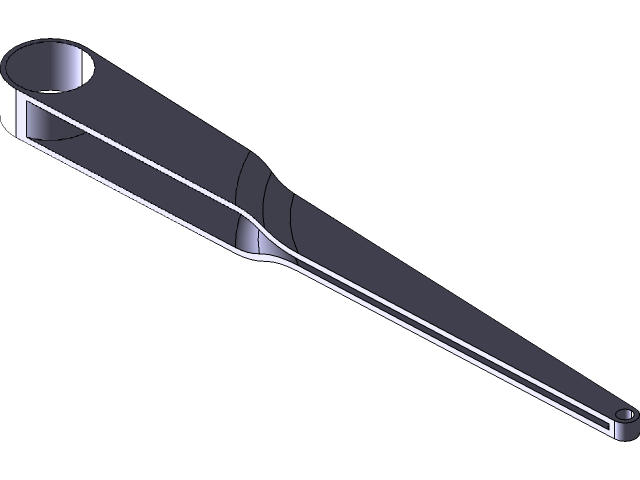
如图所示,最简单的四杆机构具有四个杆形链节和四个转向对。固定链接(黑条)实际上可能是条形的,但更常见的是它代表了机器的框架,在这种情况下,通常是不规则形状的大型铸件。
许多机制可以分解为等效的四连杆机构。这些机制在机械操作中有许多应用。它们可以被认为是基本机制之一。
理工酷提示:
如果遇到文件不能下载或其他产品问题,请添加管理员微信:ligongku001,并备注:产品反馈

评论(0)

0/250






