 资源下载
资源下载





麦克纳努姆B型车轮__修订版B3.2
文件列表(压缩包大小 43.81M)
免费
概述
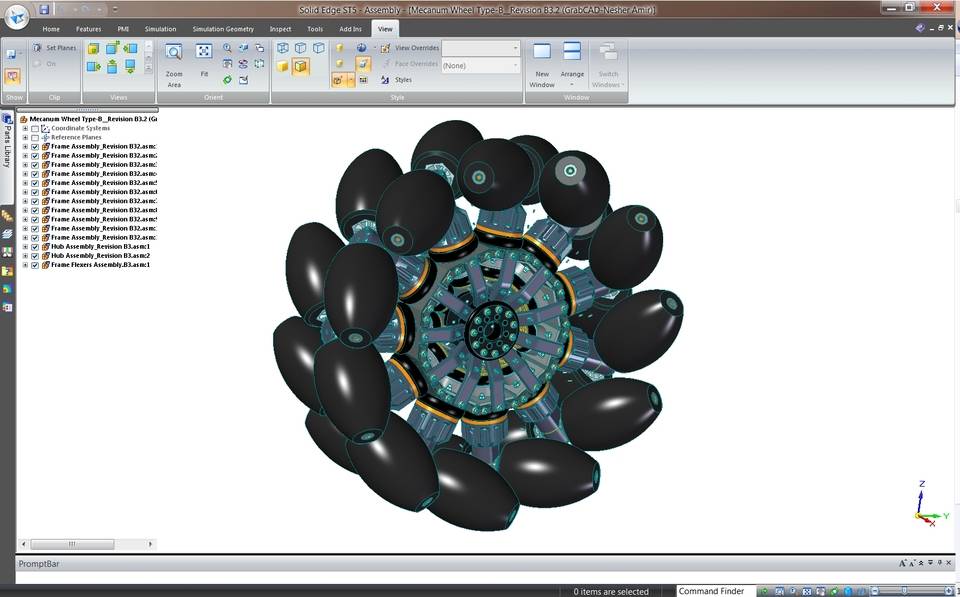
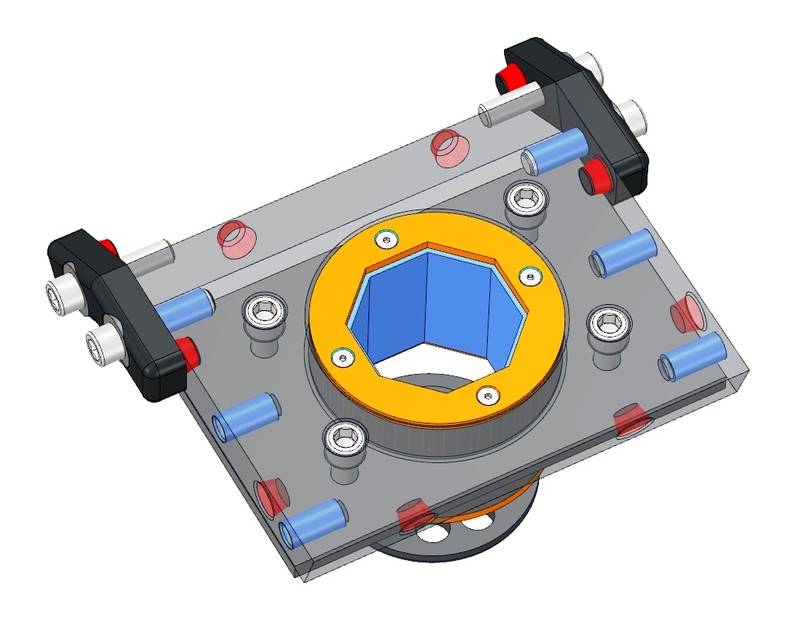
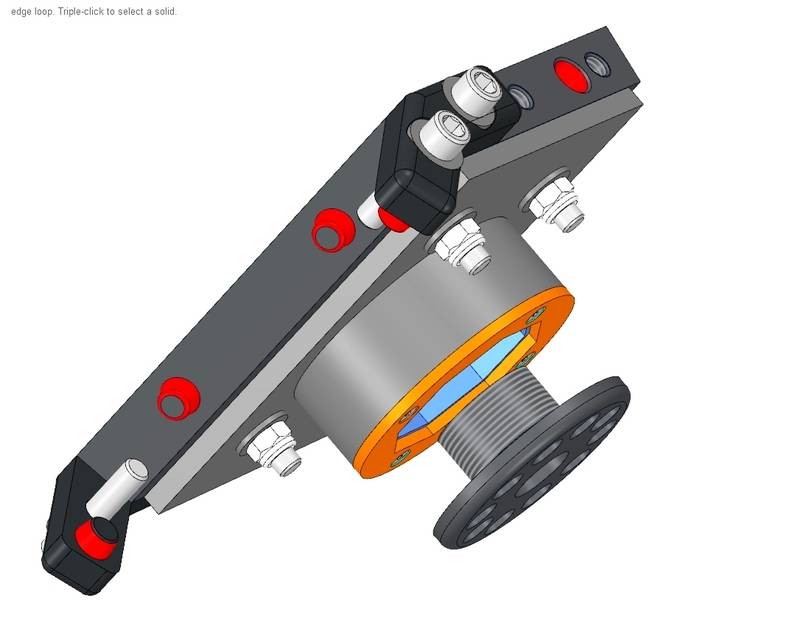
麦克纳姆轮B型修订版B-3.2
格式说明: asm格式= Solid Edge ST5(GrabCAD坚持为ST4)。 x_t格式= Parasolid文本文件。 x_b格式= Parasolid二进制传输文件。 JT格式= JT开放式CAD格式。
一个麦克纳姆轮子的一个真实的概念模型有路辗打破系统的。 标准的麦克纳姆轮虽然用途广泛,但不幸的副作用是,它大大降低了效率。其广泛的移动性归因于以下事实:外围滚轮将驱动马达力的一部分转换为与驱动马达产生的力垂直或成一定角度的力。这意味着通过辊子将力转换成合力,会损失一个方向上的大部分力。作为这种效率低下的一个极端示例,当平台对角线行驶时,只有相对的前轮和后轮在旋转,而其他两个轮上的滚子会引起电机必须抵抗的直接阻力。 (2002年11月27日至29日,澳大利亚机器人技术会议) 此问题可以通过几种方法解决: 1.控制滚筒旋转(麦克纳姆轮B型) 2.旋转滚筒组件臂(R型麦克纳姆轮) 3.旋转辐条(滚筒组件)并控制滚筒的旋转速度(BR型) 旋转主辐条还可以解决由损坏或不均匀的滚轮(侵蚀损坏)引起的一大头痛,但是您需要知道将辐条旋转多少和向哪个方向旋转(顺时针或逆时针)。您还需要知道何时旋转辐条。当然,对于制动或减慢辊子的旋转也是如此。 辊子角度和/或速度的任何变化都会影响车轮组件的主要矢量(即车轮运动的方向),称为“偏航矢量”。还有一些其他变量,例如地面条件,速度,负载,接触角等,都将以OC Vector的形式组合在一起。 令人讨厌的OCV是该系统复杂性的主要原因。陀螺伺服控制在负载下控制旋转的机械零件……精心设计复杂的系统自下而上的样式是Spaceclaim最好的选择,您可以亲眼看到。 关于此特定模型: 这是使用液压限制阀作为控制辊子旋转的手段的早期版本之一。该系统虽然相对简单和优雅,但却存在问题,并且没有通过机械仿真阶段。但是,它是真正的模型,仅缺少一些系统。传感器线束,轮毂行星减速器和限流阀线束和轮辐旋转系统和齿轮等。 即使如此,您也可以得到约1800个零件,如果您对设计有所了解,您将了解到普兰蒂(Planty)。 希望你喜欢 :) 内舍·阿米尔(Nesher Amir)
理工酷提示:
如果遇到文件不能下载或其他产品问题,请添加管理员微信:ligongku001,并备注:产品反馈

评论(0)

0/250





