资源下载
资源下载



高斯型
文件列表(压缩包大小 2.32M)
免费
概述
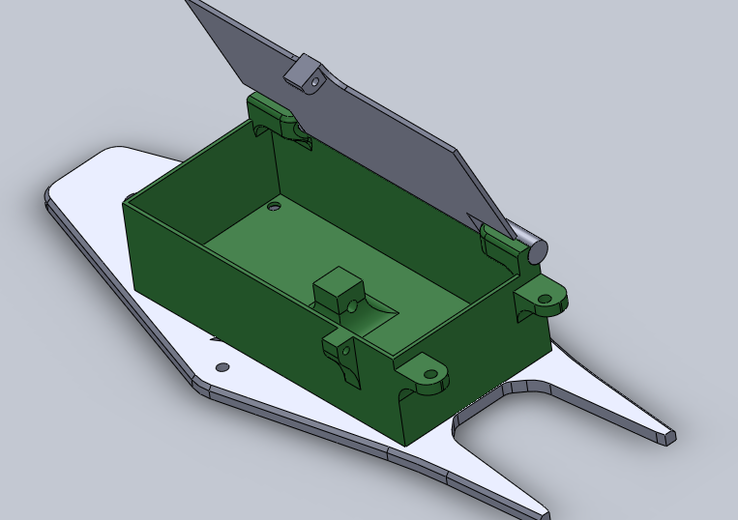
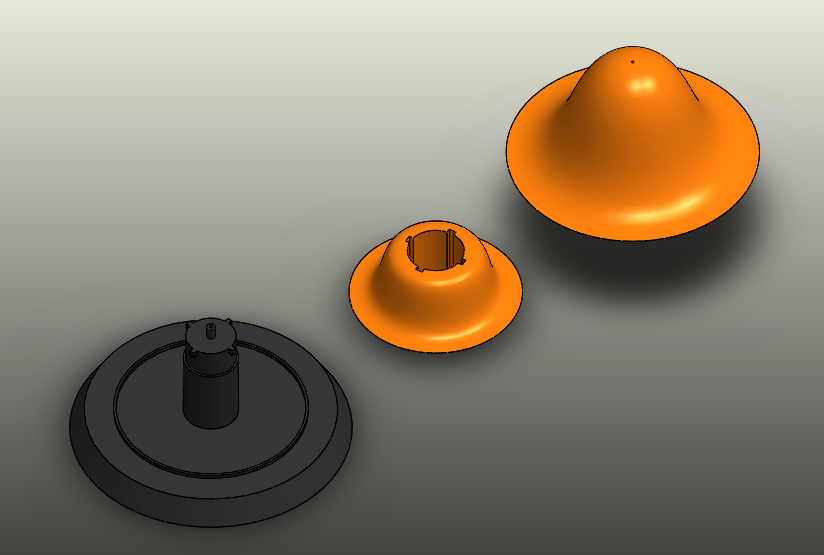
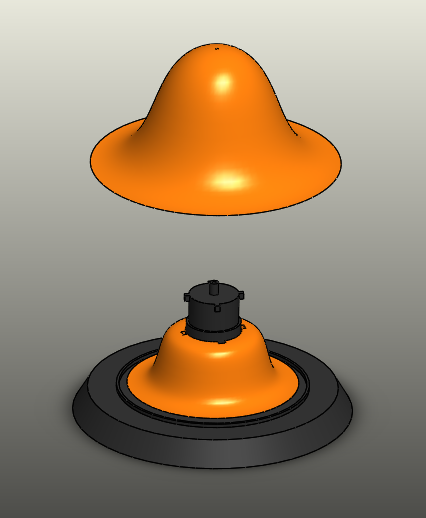
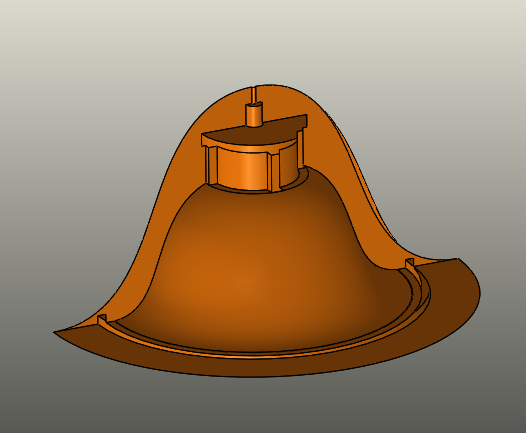
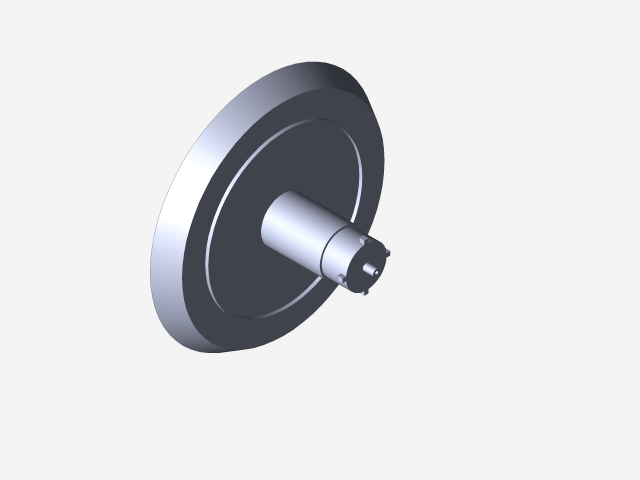
这是一个测试机器人抓手的对象,它基于“拼图”设计。对机器人的测试包括抓住顶部并将其卸下,并注意钟罩内部的准则。一旦将其移开顶部,挑战将变得更加困难,实际上,抓手必须将内部部分放在地下室中,同时仍要注意指导原则。 我以为这个物体可能对任何机器都是一个挑战,因为它实际上没有任何垂直切线表面,一旦被抓住,就必须转动它以找到正确的位置来移除零件。 我认为,如果将每个零件模制成型然后进行研磨,则对机器人来说,物体将更具挑战性(光滑度)。 我对效果图的质量感到抱歉,我会改善的。
理工酷提示:
如果遇到文件不能下载或其他产品问题,请添加管理员微信:ligongku001,并备注:产品反馈

评论(0)

0/250