 资源下载
资源下载


机器人夹爪测试对象挑战
文件列表(压缩包大小 5.50M)
免费
概述
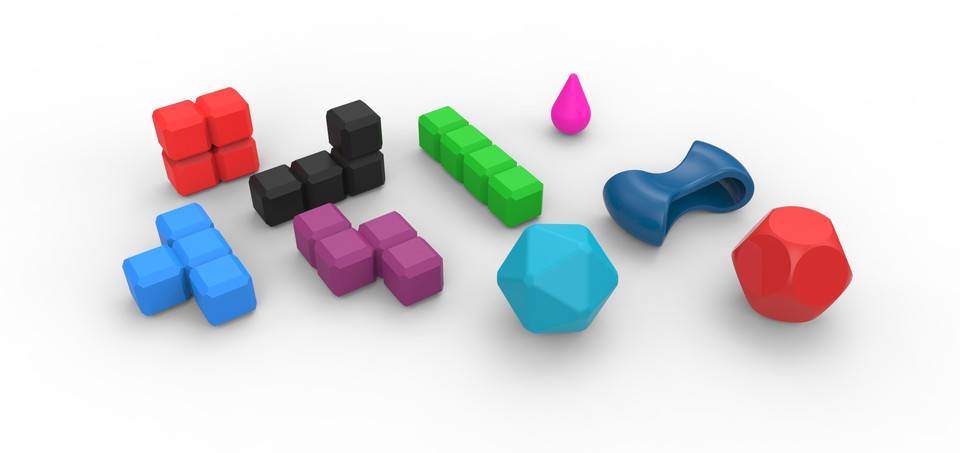
用于测量夹持力的安装板。 简单的2根管与拉伸弹簧连接的机制 安装板用螺钉固定到内板上,并具有用于螺钉的通孔 它将容纳测试对象。 选择此机制的原因: 通用对象的问题分为两个主要类别(A)形状测试对象 S.T.O. (B)强制测试对象(FTO)。 -形状测试对象应具有指定的几何形状和形状,因此应该有共同的基础 用于计算和结果比较。 -物体的大小和形状应廉价制造或作为廉价商业物品购买 (例如,网球67毫米,乒乓球40毫米) -形状测试对象可以进行3D打印,并且可以轻松地用作“力测试对象”。 -廉价的安装基地建设 -根据弹簧的大小和管子的长度,可以很容易地针对不同的负载计算进行调整。
形状: -TETRIS块易于制造(3D打印,CNC甚至纸张)。 -DICE D20和D12提供简单的几何形状,但组合很少,易于制造或查找商业版本。 -水滴形状提供了多种选择来测试握持角度,我看不出使物体变得复杂的原因,可以轻松制造水滴尺寸和角度的简单变化。提供针对特定挑战的研究可以统一机器人手臂的结果和规格(对于大小范围,我建议使用公制和英制大小作为液滴形状的基本直径) -球体的组合(STO_02有趣的形状简化并减少了用于测试夹爪的球体的数量。易于制造的基本零件,但是材料的变化也可以提供更大范围的挑战性形状。
**一言以蔽之,我建议使用一组简单的形状,这些形状很容易制造,也可以作为常见的商业物品找到。
理工酷提示:
如果遇到文件不能下载或其他产品问题,请添加管理员微信:ligongku001,并备注:产品反馈

评论(0)

0/250






