资源下载
资源下载

Cadathon Swerve驾驶Tri-bot
文件列表(压缩包大小 8.05M)
免费
概述
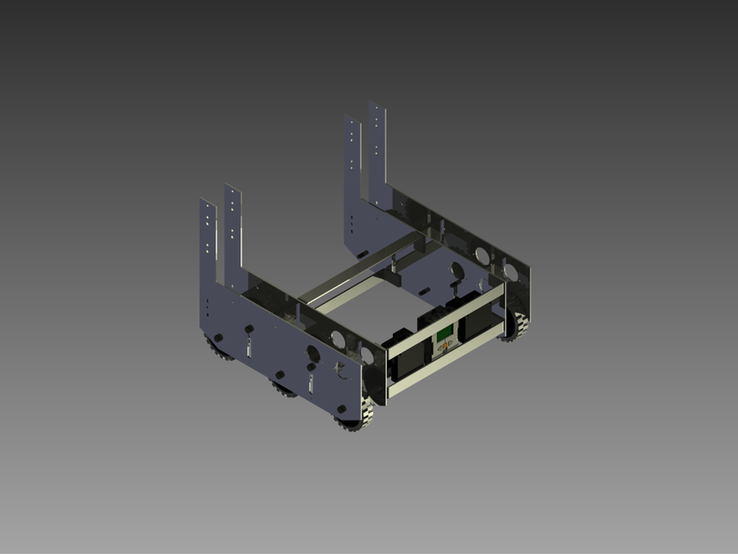
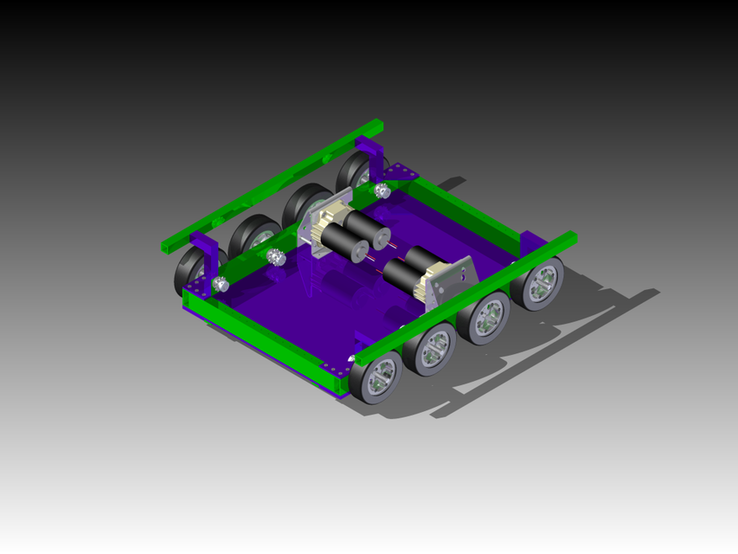
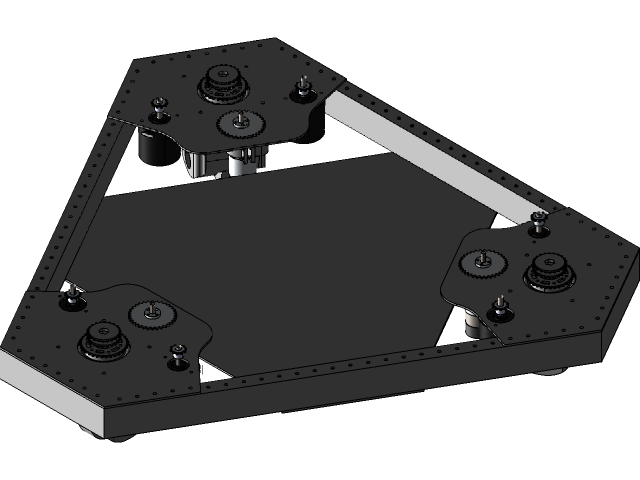
这是由FRC团队6635设计的Swerve Drive Tri-bot底盘。
它被设计为每个车轮使用两个Rev NEO电动机,因此该设计的每个车轮具有相对较低的齿轮比。
该机器人针对高速行驶进行了优化,这意味着它不应该参与打斗。
此转弯驱动器是为我们参加F4 Cadathon比赛而开发的,在现实生活中生产不是很可行。
理工酷提示:
如果遇到文件不能下载或其他产品问题,请添加管理员微信:ligongku001,并备注:产品反馈

评论(0)

0/250