资源下载
资源下载





基于机器人手臂的挖掘机累计重载采样器
文件列表(压缩包大小 34.87M)
免费
概述
**更新2.3(29/9/18)- 添加了以下文件 ---顶层装配草图文件,其中包括所有必需的设计尺寸 ----。jpg格式的功率预算图形表显示了一个采样周期内所需的功率 ----。pdf格式的技术文档,详细介绍了设计的所有重要方面。
**更新2.2(27/9/18)- 以.gif格式添加了设备采样过程的运动模拟,并使用相同的内容更新了运动模拟的Youtube链接。 添加了.jpg格式的设备重量预算。
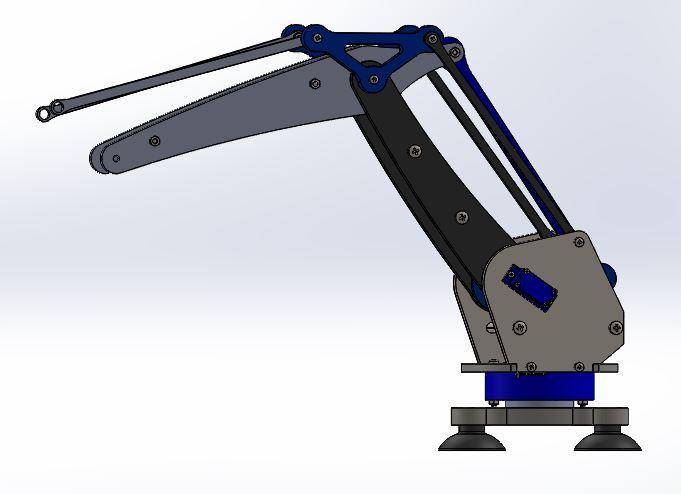
该设计是大约两周前提交的设计的第二次更新。 基本概念是相同的,除了将MOS2固体润滑剂轴承用于仰角枢轴销以及将滚针推力滚子轴承与深冲滚针轴承一起用于方位角。设计的采样部分重约150克,由聚四氟乙烯制成。提取,仰角和方位角驱动器及其外围设备仅重约500 gm。重量完全取决于从月球下降模块上的月球表面放置的手臂的高度。 着陆器脚附近的着陆相机被认为是对样品的目视检查,并且以下youtube链接上的动画阐明了该机构的工作原理。
为了减轻整个系统的重量,紧固件全部按照ASTM B348标准由钛制成。
理工酷提示:
如果遇到文件不能下载或其他产品问题,请添加管理员微信:ligongku001,并备注:产品反馈

评论(1)

0/250
下载后的评价
感恩分项!
2023-06-17
回复