资源下载
资源下载
简介
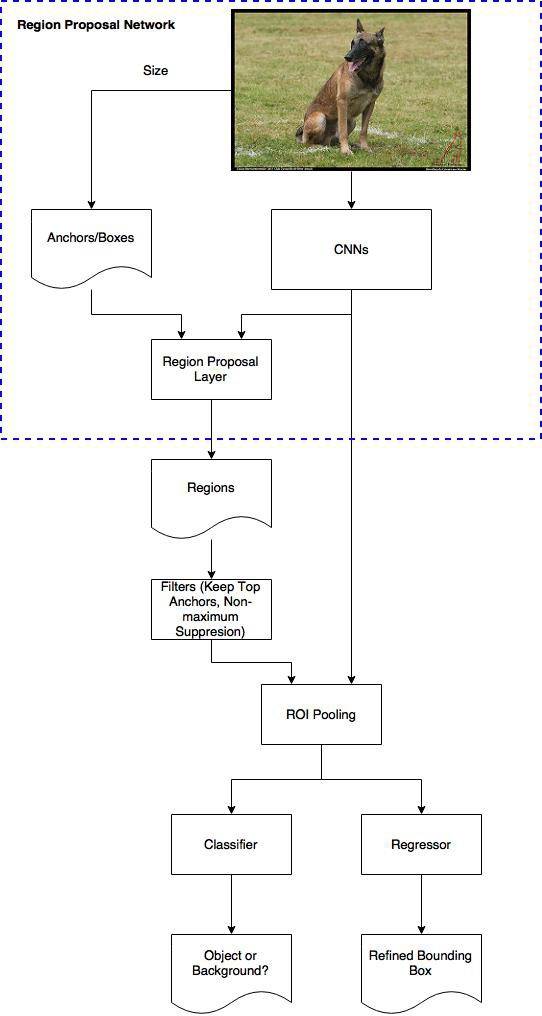
FRCNN用于生成区域提议网络(RPN)和使用此类提议定义工件的网络。此处的主要区别在于Faster R-CNN通过选择性搜索生成区域提议。在RPN中,如果RPN与目标检测网络共享最多的计算量,则产生区域建议的时间成本将远低于选择性搜索。简而言之,RPN放置区域框(称为锚点)并提出包含最可能的项目提议。以下是它的体系结构。
比较
在不同的物体检测器之间进行公平的比较是非常困难的。在哪种模型上取得的效果更好,没有直接的答案。于是,我们将精度和速度结合在一起,以用于实际应用。除了检测器的类型之外,我们还必须知道影响结果的其他选择:
- 提取器(VGG16,ResNet,MobileNet Inception)。
- 能否大幅提高提取效率。
- 图像数据的分辨率。
- 兼容性策略和IoU阈值(故障估计如何排除预测)。
- 删除非最大oU阈值。
- 示例挖掘比率(锚的正负比率)。
- 建议或预测的数量。
- 边界外壳的编码。
- 附加的结果
- 数据集指令。
- 在训练或学习中是否使用多尺寸图片(裁剪)。
- 哪一层或多层映射特征以检测伪像。
- 位置损失的作用。
- 是否使用工具进行深度学习。
- 训练条件,包括批大小,图像输入大小,学习率和衰减。
该技术最严重的问题是:任何类比都容易过时。通过整理文章的结论,可以一起查看这些比较数据。然后,进行Google Research调查。希望通过在一种情况下介绍几种观点来更好地理解性能环境。
这些是2012年PASCAL VOC研究系列的发现。在Faster R-CNN结果在最后三行中。第二列显示了国家提案网络生成的投资回报率。第三列显示用于准备的已使用数据集。第四列是平均测量精度(mAP)。
图1:VOC 2012(Faster R-CNN)
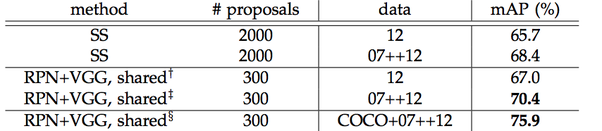 图2:COCO(Faster R-CNN)
图2:COCO(Faster R-CNN)
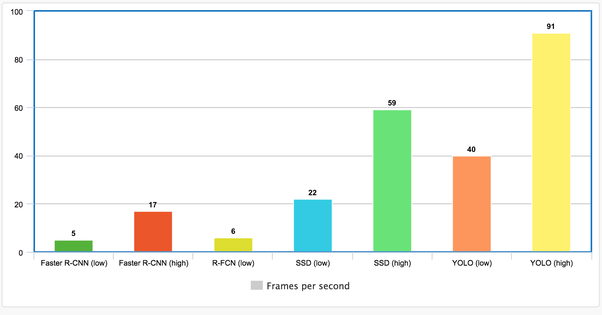
 图3:K40 GPU上的PASCAL VOC 2007测试集,以毫秒为单位
图3:K40 GPU上的PASCAL VOC 2007测试集,以毫秒为单位
 将现有的不同论文的发现进行并排比较是不明智的。此类研究是在各种环境中进行的,无意于在结果之间建立关联。但是,将它们组合在一起效果会很好,因此我们至少可以大致了解它们的位置。但是,由于前面提到的原因,我们永远无法明确比较这些数字。
该型号配备了2007年和2012年的PASCAL VOC数据,用于以下所示的测试。
PASCAL VOC 2012测试套件测试了mAP。
表中显示了300到300和512 = 512的SSD图像的结果。
YOLO的结果包含288张图像,416张图像和544张图像的544张图像。
对于YOLO,在相同环境下,较慢的过程,高分辨率的图像具有更好的mAP。
将现有的不同论文的发现进行并排比较是不明智的。此类研究是在各种环境中进行的,无意于在结果之间建立关联。但是,将它们组合在一起效果会很好,因此我们至少可以大致了解它们的位置。但是,由于前面提到的原因,我们永远无法明确比较这些数字。
该型号配备了2007年和2012年的PASCAL VOC数据,用于以下所示的测试。
PASCAL VOC 2012测试套件测试了mAP。
表中显示了300到300和512 = 512的SSD图像的结果。
YOLO的结果包含288张图像,416张图像和544张图像的544张图像。
对于YOLO,在相同环境下,较慢的过程,高分辨率的图像具有更好的mAP。
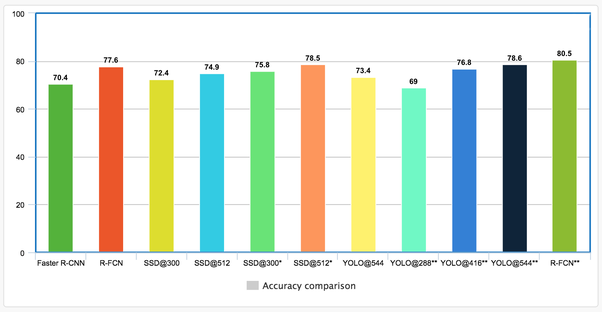
*表示小对象数据增加。
** 显示VOC 2007测试集合测试了结果。这些是YOLO论文的一部分,该论文缺少VOC 2012的一些测试结果。由于VOC 2007的结果通常好于2012,因此我们对2007年的R-FCN VOC测试添加了交叉引用。
图像分辨率和提取器功能输入会影响速度。相关论文中记录的最高和最低FPS如下所示。但是,以下结果可能是非常初步的,特别是在不同的mAP测量中。
结论
关键问题不是什么是最好的检测器。真正的问题是,哪种检测器和哪种设置可以使我们在应用所需的速度和精度之间达到最佳平衡。以下是精确度和精确度的关系。如下图所示
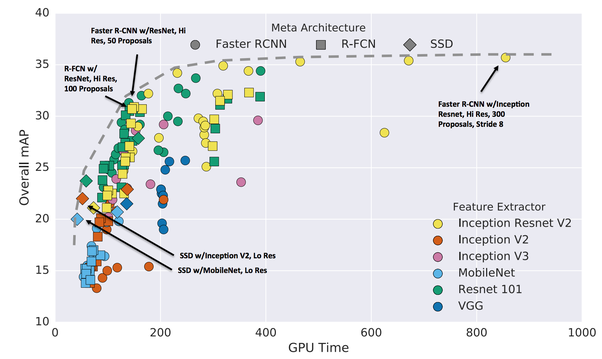 从所有这些我们可以得出结论:
从所有这些我们可以得出结论:
- Faster R-CNN通常比R-CNN更可靠,更快。
- Faster R-CNN具有300 Inception Resnet,可以以1 FPS的速度为所有测试用例提供最佳的精度。
- 此图还有助于识别最佳点,以便快速恢复交易精度。
- 残留网络R-CCN模型在精度和尺寸之间取得了很好的平衡。 转载自:https://www.quora.com/Which-algorithm-is-best-for-detecting-an-object-FRCNN-or-RCNN